Balancing Ball & Beam System
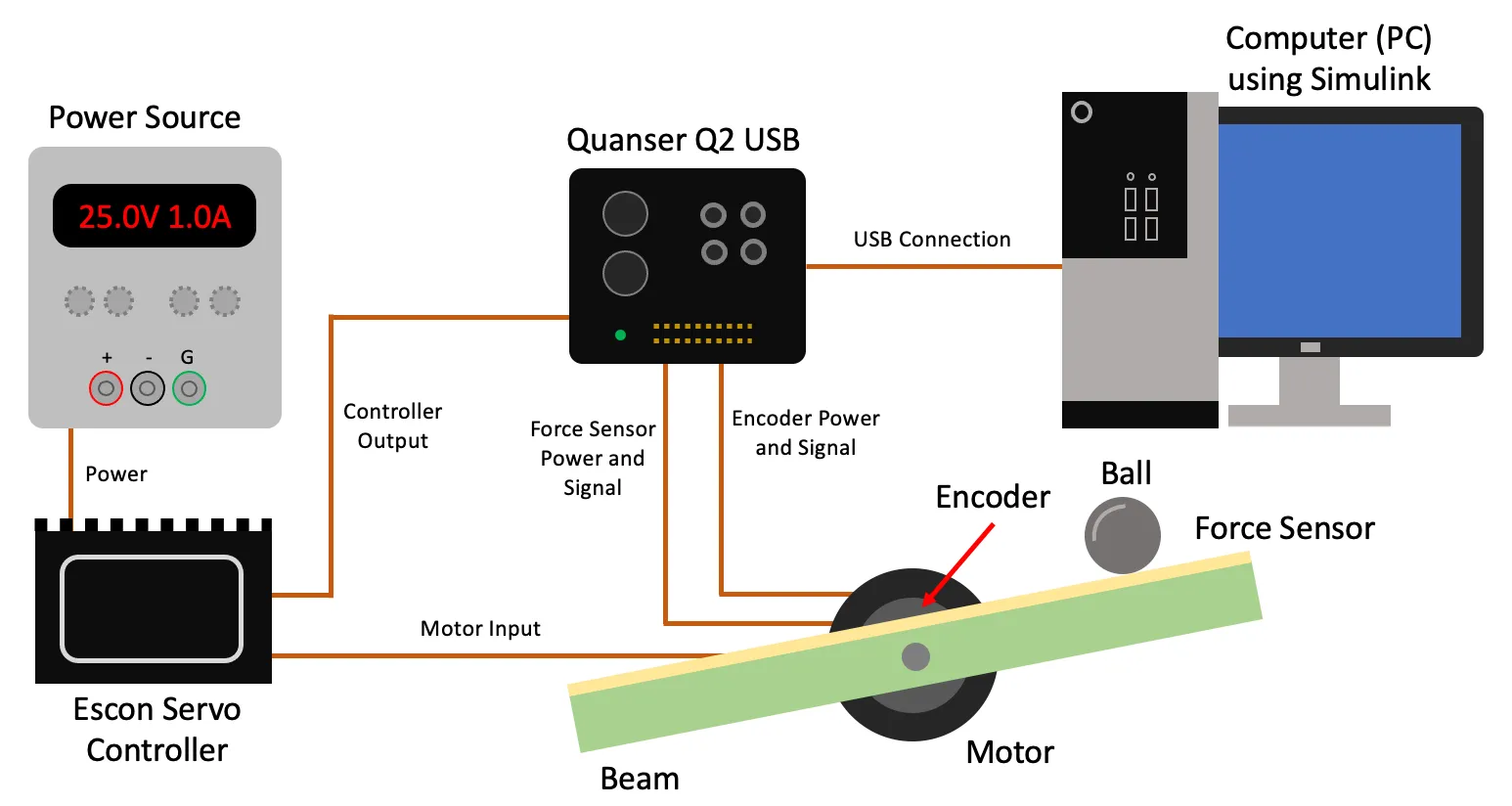

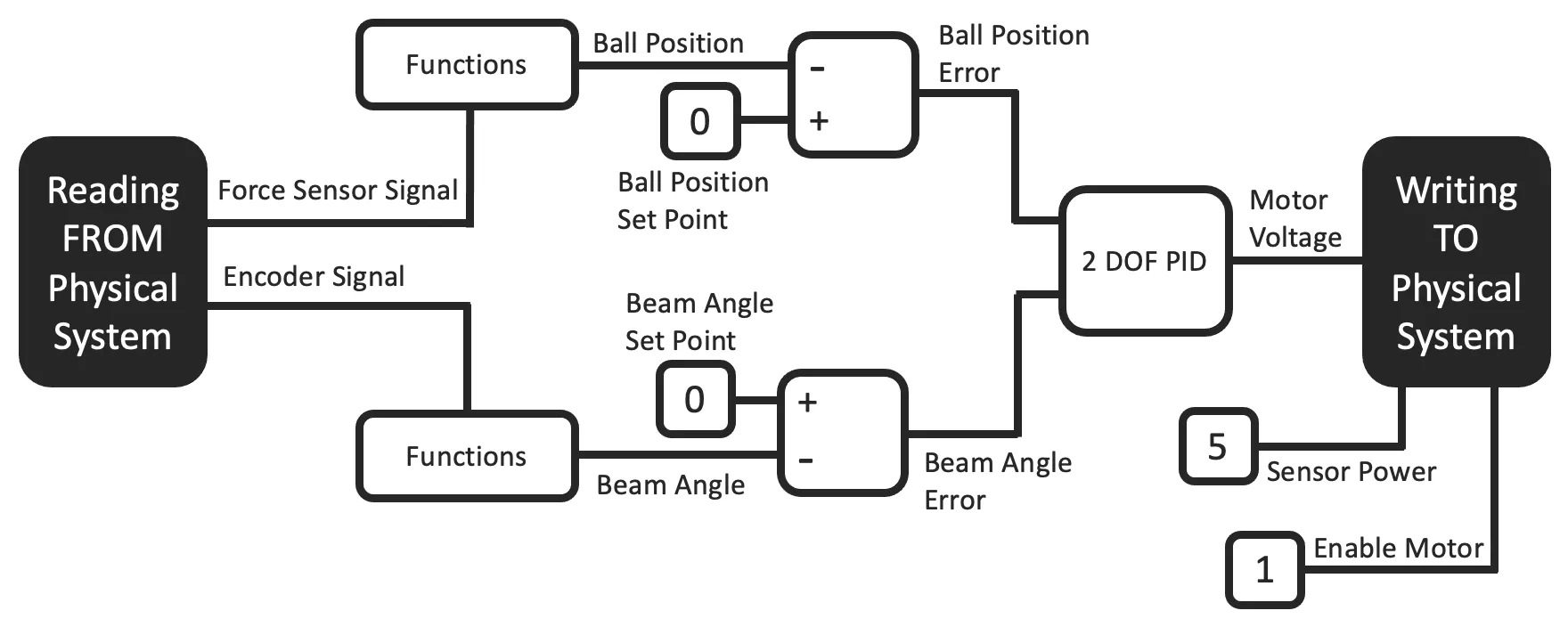
We started this project by deriving the equation of motion for our system using the Lagrangian method taking the following assumptions into account: no slipping between the ball and beam, no gearbox backlash, and no stiction. Using a state space model of our system, we then implemented our PID controller in simulation for testing. After tuning our constants and getting an acceptable time response, we implemented this with our actual hardware: ball, beam, force sensors along the beam, motor, and encoder. The connections between all the hardware elements can be seen above. The final controller used was a two-degrees-of-freedom PID controller, with inputs of ball position and beam angle, and an output of motor voltage.