Line Tracking Robot
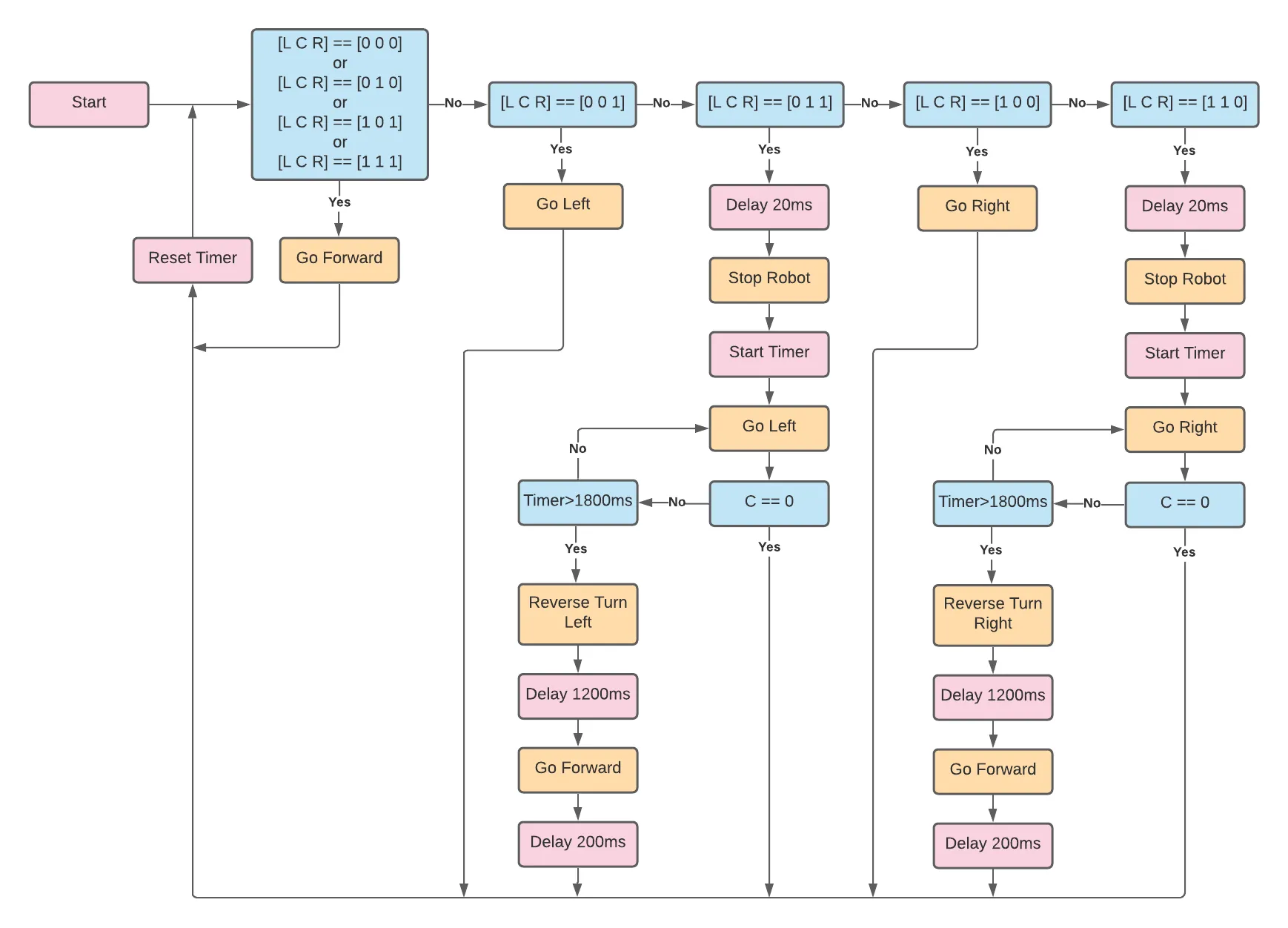
Our group decided that the line could be accurately tracked by using 3 light sensors, an Arduino board, and two motors. The control structure was set up in a way that would attempt to have the middle light sensor be the only sensor seeing the line underneath it. If the line was seen by the left or right sensor, unequal voltages were sent to the wheels causing the robot to turn and readjust itself. This strategy works successfully as long as there is one continuous line, which was not always the case for us. Other more specific if-statements and fail-safes had to be implemented for the trickier parts of the track to ensure a successful run every time.
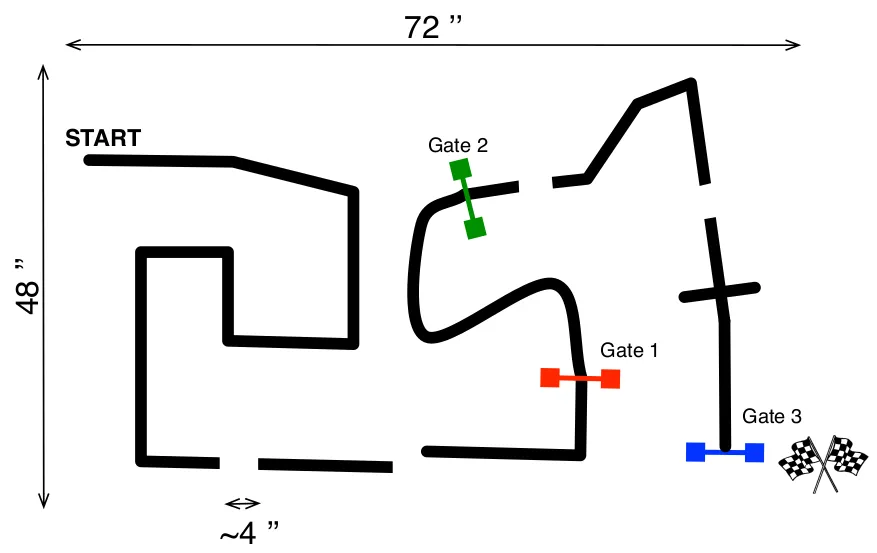

While our robot wasn't the fastest in the class (it was second fastest), it was the most consistent, as it was the only robot to complete all 3 of its trials successfully. We know we could have made the robot go faster, but one of our main objectives was to avoid slipping, so we decided to go with a "medium" speed.