Gait Modeling
For this work, I am using the Neuromuscular Gait Model by Seungmoon Song and Hartmut Geyer. This is a complex, three-dimensional model that has a trunk, thighs, shanks, and feet. The hips of the model are two degrees of freedom, while the knees and ankles are both one degree of freedom. Each leg has 11 Hill-type muscle-tendon units, and each foot interacts with the ground through four contact points. The model is controlled at its highest level by a supraspinal layer that makes big-picture decisions such as target foot placement and setting a desired trunk angle. Information from this layer is then passed on to the spinal layer, which works through 10 reflex modules to guide the model through the gait cycle. The outputs of this layer then act as an input to the muscular layer, where the muscles contract and generate motion.
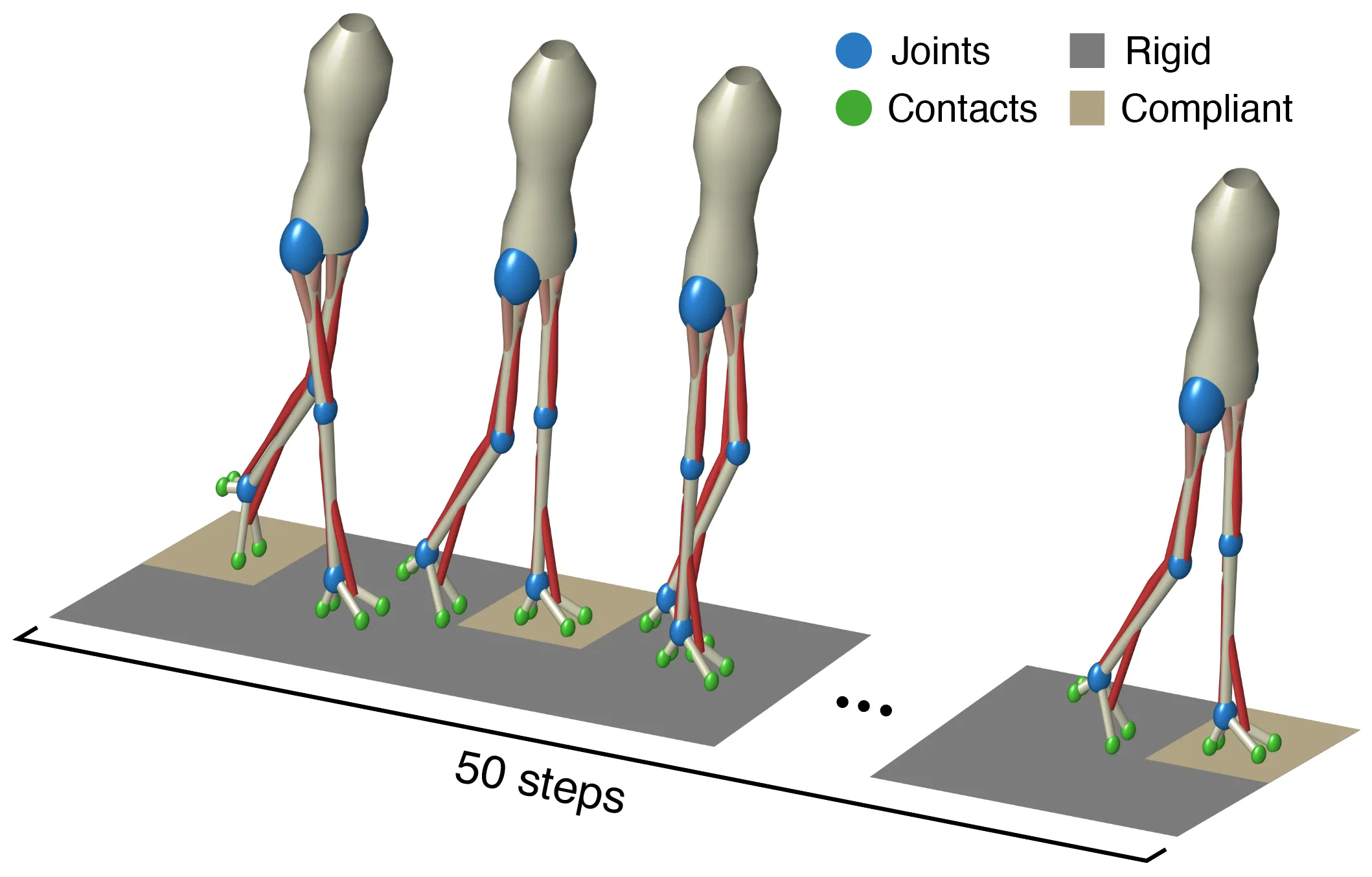
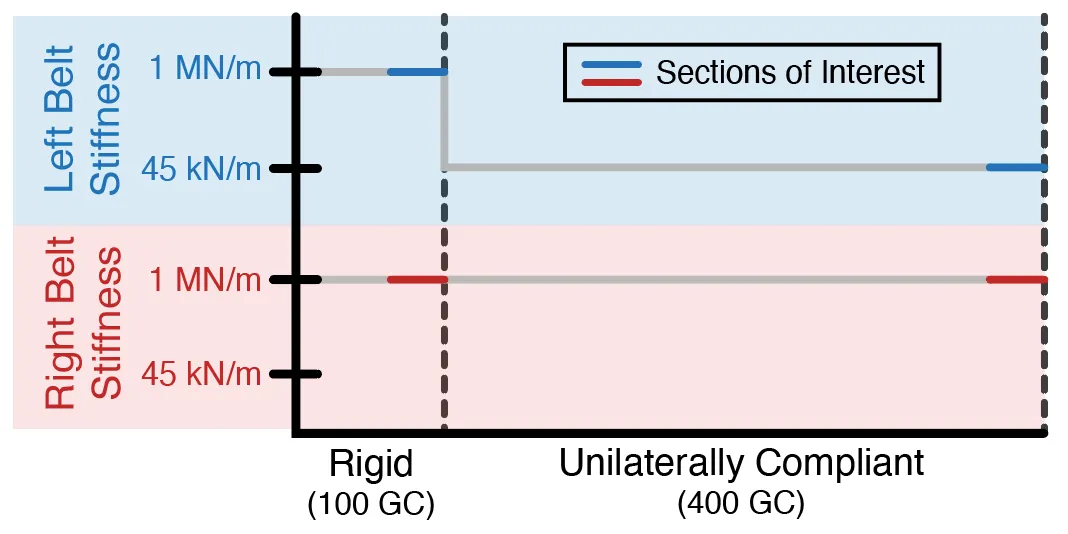
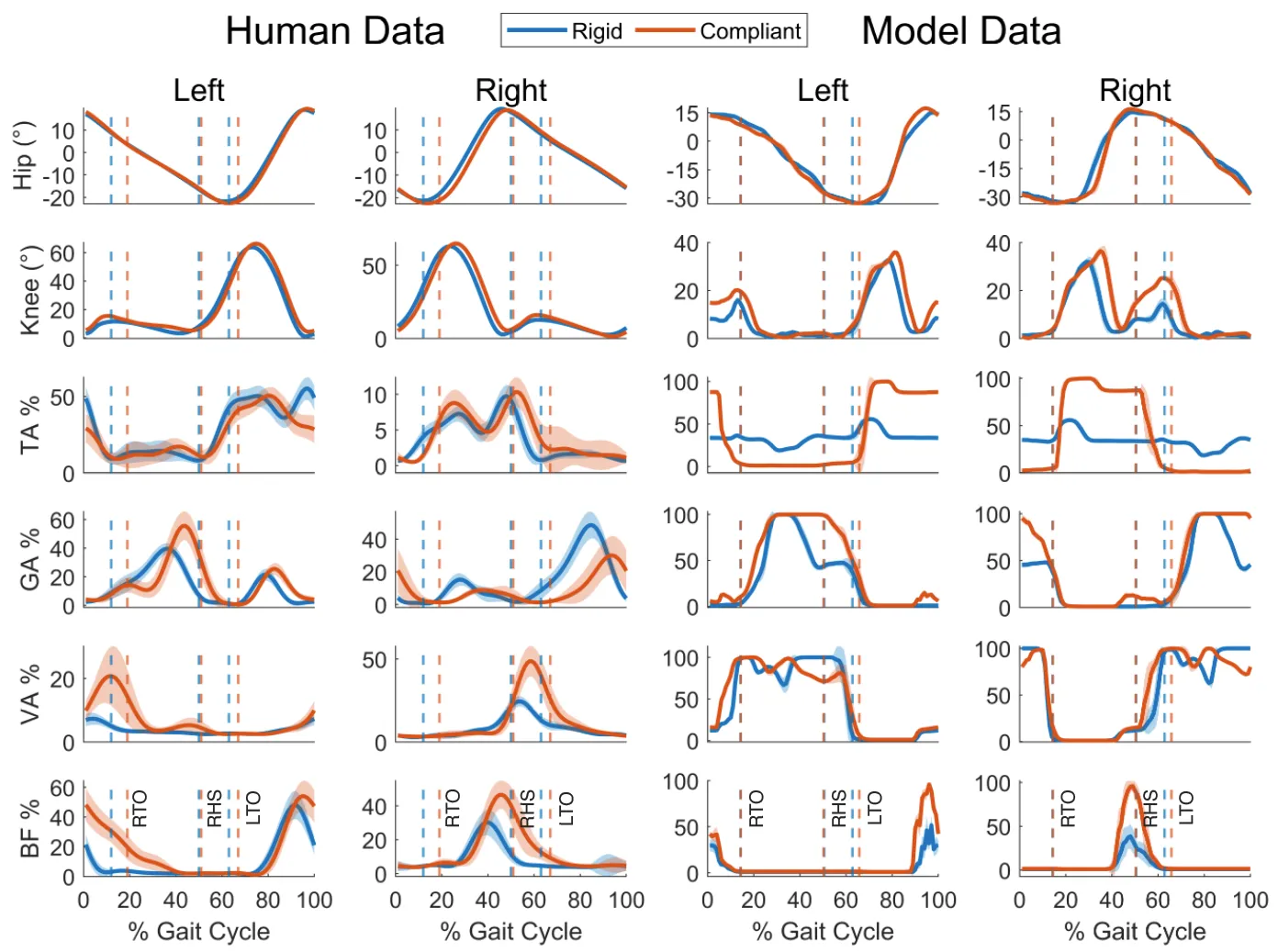
Most recently, I have been enabling this model to walk indefinitely in a unilaterally compliant environment. While in previous works, by the creator of this model, it has been able to walk in a variety of complex environments (slopes, stairs, rough surfaces), it has never been tested in compliant terrain. At the beginning of my testing, the model was not originally able to walk successfully on this unilaterally soft ground. Because of this, I used Covariance Matrix Adaptation Evolution Strategy (CMA-ES) optimization to optimize the 82 control parameters that help calibrate the model for different tasks. Post-optimization, the model was able to successfully walk in this complex terrain and even show kinematic and muscle activity data that was similar to human subjects in a past study. The areas of the human experiment compared with the model data can be seen above, and the results are further explained in the video below.